Development Work
Red Removal Program
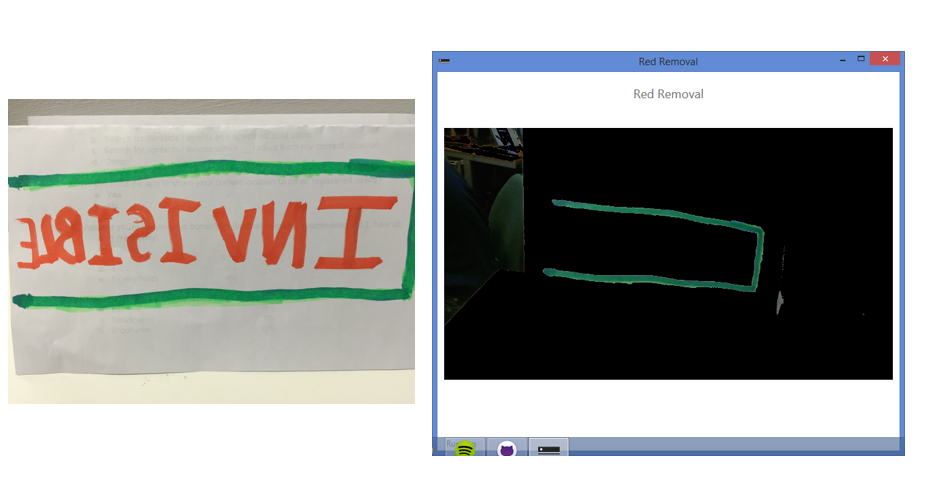
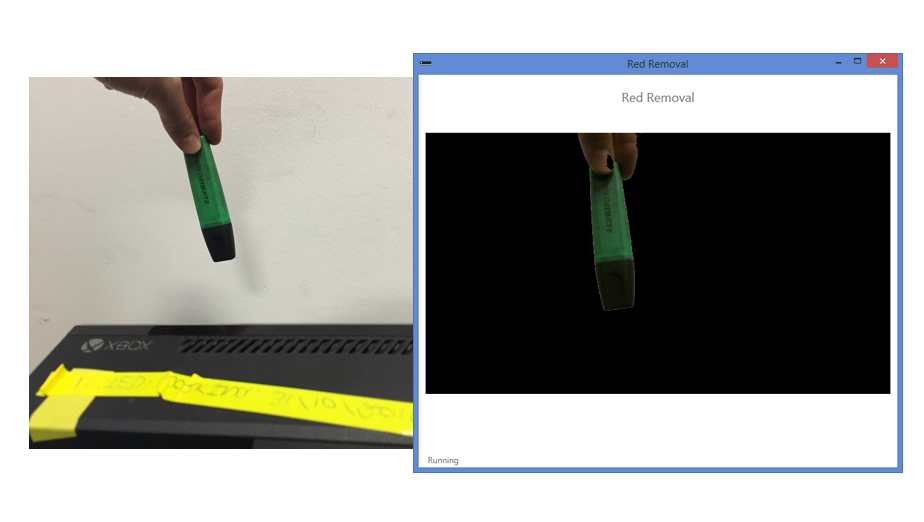
We created a prototype for the project, this consisted of two programs which will be merged together to form the main basis of the final system. The first is the 'bed removal' program which removes any red from the image (this also includes white as white is composed of all three of red, blue, green, or RGB) this means the program acts similarly to a green screen and in these pictures below you can see the white and red have been removed and the green outline is remaining, similarly in the image with the pen all that remains is the pen, which is the foreground object. This is useful for our project as it will help us to establish the difference between foreground, the tool, and the background, the body, in the image in the body.
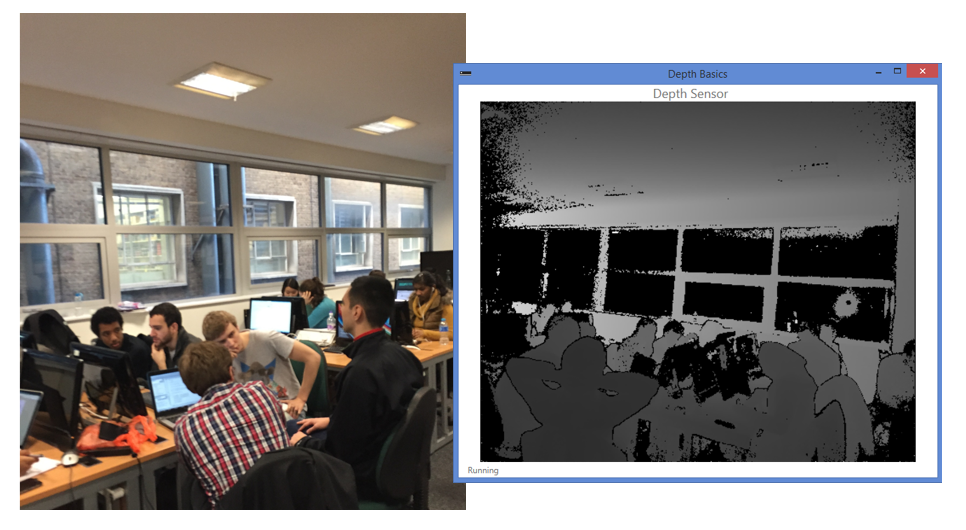
Depth Sensing Program
The other program as part of this prototype is the depth sensing. This produces an image from the depth information the Kinect provides, as such we are able to produce a greyscale bitmap where the brighter the pixel, the further away from the camera. In the image there are a few anomalies such as windows, this is due to the fact the light does not bounce off the windows and so a reading cannot be made. In addition there is some noise around the edges of the image. Neither of these issues are problems as there will not be transparent surfaces in the body and the tool should be in the middle of the image.